يشرح المنشور وحدة التحكم في محرك التيار المستمر التي تتميز بتعويض ثابت لعزم الدوران لتمكين المحرك من العمل بسرعة ثابتة بغض النظر عن الحمل عليه.
عيب أجهزة التحكم بالسرعة العادية
عيب واحد من غالبية تحكم بسيط في السرعة هم فقط يزودون المحرك بجهد ثابت محدد مسبقًا. نتيجة لذلك ، لا تظل السرعة ثابتة وتتغير مع الحمل على المحرك ، بسبب عدم وجود تعويض عزم الدوران.
على سبيل المثال ، في قطار نموذجي ، باستخدام وحدات تحكم بسيطة ، تنخفض سرعة القطار تدريجيًا مع تدرجات التسلق وتتسارع أثناء الانحدار.
ومن ثم بالنسبة للقطارات النموذجية ، فإن تعديل التحكم في الوعاء للحفاظ على سرعة المحرك المختارة ينحرف أيضًا اعتمادًا على الحمل الذي قد يجره المحرك.
تتخلص دائرة التحكم في سرعة محرك عزم الدوران الثابت الموضحة في هذه المقالة من هذه المشكلة من خلال تتبع سرعة المحرك والحفاظ عليها ثابتة لإعداد تحكم محدد مسبقًا ، بغض النظر عن الحمل على المحرك.
يمكن تطبيق الدائرة في معظم الموديلات التي تستخدم محرك مغناطيسي دائم DC.
حساب عامل EMF الخلفي
يتكون الجهد عبر أطراف المحرك من عاملين ، وهما e.m.f. التي ينتجها المحرك ، وانخفض الجهد عبر مقاومة المحرك.
الظهر e.m.f. التي تم إنشاؤها بواسطة لف المحرك تتناسب عادةً مع سرعة المحرك ، مما يعني أنه يمكن مراقبة سرعة المحرك عن طريق قياس محتوى emf الخلفي هذا. ولكن ، المشكلة الرئيسية هي عزل واكتشاف e.m.f. من جهد مقاومة المحرك.
لنفترض أن المقاوم المنفصل متصل في سلسلة مع المحرك ، بعد ذلك ، مع الأخذ في الاعتبار أن تيارًا واحدًا مشتركًا يمر عبر هذا المقاوم وأيضًا من خلال مقاومة المحرك ، يمكن أن يكون انخفاض الجهد عبر المقاومتين المتسلسلتين مكافئًا للانخفاض عبر مقاومة المحرك.
في الواقع ، يمكن افتراض أنه عندما تكون قيمتا المقاومة هاتين متطابقتين ، فإن قدرا الجهد عبر كل من المقاومات سيكونان متشابهين أيضًا. باستخدام هذه البيانات ، قد يكون من الممكن خصم انخفاض الجهد R3 من جهد المحرك ، والحصول على قيمة emf الخلفية المطلوبة للمعالجة.

إعادة معالجة EMF لعزم الدوران الثابت
تراقب الدائرة المقترحة باستمرار التيار الكهربائي الخلفي. وبناءً عليه ، ينظم تيار المحرك لضمان أنه ، لإعداد التحكم في الوعاء المخصص ، يتم الحفاظ على قوة emf الخلفية ، جنبًا إلى جنب مع سرعة المحرك عند عزم دوران ثابت.
لتكون قادرًا على تسهيل وصف الدائرة ، يُعتبر أن P2 قد تم ضبطه والاحتفاظ به في موضعه المركزي ، ويتم اختيار المقاوم R3 كمكافئ لقيمة مقاومة المحرك.
حساب جهد المحرك
يمكن حساب جهد المحرك عن طريق إضافة e.m.f. Va مع انخفاض الجهد عبر المقاومة الداخلية للمحرك Vr.
بالنظر إلى أن R3 يسقط جهدًا Vr ، فإن جهد الخرج Vo سيكون مساويًا لـ Va + 2 V.
سيكون الجهد عند المدخل المقلوب (-) من IC1 هو Va + Vr ، وسيكون ذلك عند الإدخال غير المقلوب (+) هو Vi + (Va + 2Vr - Vi) / 2
نظرًا لأنه من المفترض أن تكون قيمتا الجهد أعلاه متساويتين ، فإننا ننظم المعادلة أعلاه على النحو التالي:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
يؤدي تبسيط هذه المعادلة إلى توفير Va = Vi.
تشير المعادلة أعلاه إلى أن e.m.f. يتم تثبيت المحرك باستمرار على نفس مستوى جهد التحكم. يتيح ذلك للمحرك العمل بسرعة ثابتة وعزم دوران لأي إعداد محدد لضبط السرعة P1.
يتم تضمين P2 لتعويض مستوى الاختلاف الذي قد يكون موجودًا بين مقاومة R3 ومقاومة المحرك. ينفذ هذا عن طريق ضبط حجم ردود الفعل الإيجابية على مرجع الإدخال غير العكسي.
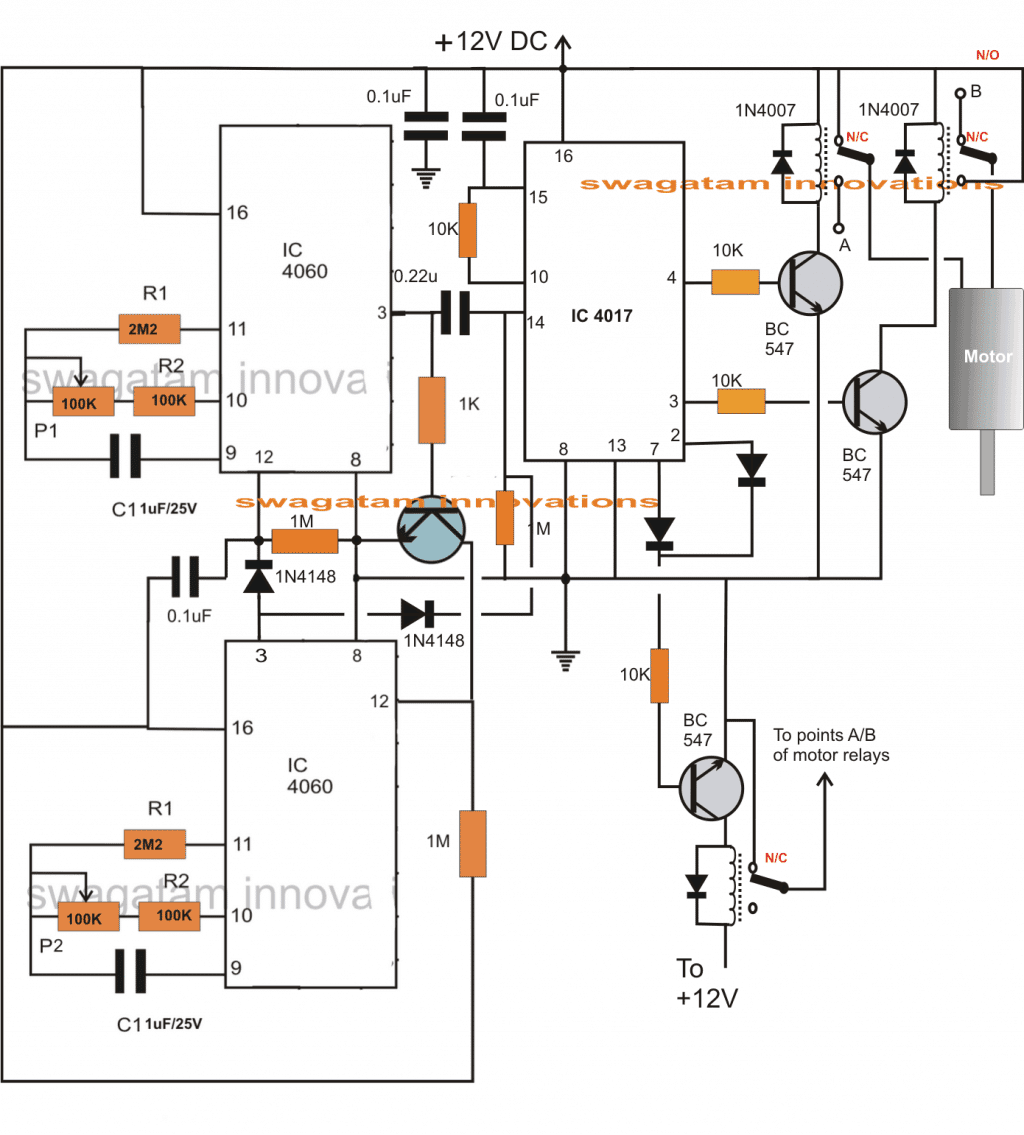
يقارن المرجع أمبير LM3140 بشكل أساسي الجهد المطوَّر عبر المحرك المحرك مع مكافئ emf الخلفي عبر المحرك وينظم الإمكانات الأساسية لـ T1 2N3055.
يتم تكوين T1 كملف المتابع الباعث ينظم سرعة المحرك وفقًا لإمكاناته الأساسية. إنه يزيد الجهد عبر المحرك عندما يتم اكتشاف قوة دفع خلفية أعلى بواسطة المرجع ، مما يؤدي إلى زيادة سرعة المحرك ، والعكس صحيح.
يجب أن يتم تركيب T1 فوق غرفة تبريد مناسبة من أجل الأداء السليم.
كيفية إعداد الدائرة
يتم إعداد دائرة التحكم في سرعة محرك عزم الدوران الثابت عن طريق ضبط P2 مع محرك مع حمولة متغيرة حتى يحقق المحرك عزم دوران ثابتًا بغض النظر عن ظروف التحميل.
عند تطبيق الدائرة على القطارات النموذجية ، يجب الحرص على عدم الانعطاف أكثر من اللازم نحو P1 مما قد يؤدي إلى تباطؤ قطار النموذج ، وعلى العكس من ذلك ، يجب عدم تدوير P2 كثيرًا في الاتجاه المعاكس ، مما قد يؤدي إلى في الواقع ، تزداد سرعة القطار بشكل أسرع أثناء تسلق أحد درجات الانحدار.
زوج من: تم استكشاف دوائر شاحن بطارية Ni-Cd البسيطة التالي: دائرة الإرسال والاستقبال المصغرة