مقدمة للروبوتات
الروبوت هو آلة تشبه البشر. لقد تمت برمجته لعمل شيء ما. تأتي كلمة Robot من الكلمة السلافية robota (بمعنى العامل القسري). تم تطوير الروبوت في عام 1960 ، الروبوتات مصنوعة من معادن وخلاط من عناصر أخرى. تقوم الروبوتات بالأمر فقط وما يقوله البشر. قبل ثلاثين عامًا ، كانت الروبوتات شيئًا ما في فيلم خيال علمي. لكن الروبوتات تستخدم اليوم في العديد من المجالات. وهي مهمة جدًا لمستقبل البشرية. ال التقنيات الروبوتية يتم تحسينها لمساعدة الدفاع الوطني والرعاية الصحية والتصنيع والأمن الداخلي والتعليم والسلع الاستهلاكية والعديد من القطاعات المختلفة. بالفعل يستخدم الأطباء الروبوتات في العمليات الجراحية الخاصة. تعتبر الروبوتات مهمة لأنها تؤدي مهامًا خطيرة ويستحيل على الإنسان القيام بها أيضًا.
5 أسباب لشعبية الروبوتات
- سرعة
- البيئات الخطرة
- مهام متكررة
- كفاءة
- صحة
سرعة:
يمكن استخدام الروبوتات لأنها أسرع من الأشخاص في تنفيذ المهام. الروبوت هو حقا آلية يتحكم فيها الكمبيوتر. نحن نعلم أن أجهزة الكمبيوتر يمكنها إجراء العمليات الحسابية ومعالجة البيانات بسرعة كبيرة مقارنة بالبشر. تتحرك بعض الروبوتات بسرعة أكبر في تنفيذ مهمة ما ، مثل التقاط العناصر وإدخالها ، أسرع من الإنسان.
البيئات الخطرة:
يمكن استخدام الروبوتات في بيئة خطرة لأنها يمكن أن تعمل في مكان يكون فيه الإنسان في خطر. على سبيل المثال ، يمكن تصميم الروبوت ليحمل قدرًا أكبر من الحرارة والإشعاع والأبخرة الكيميائية مما يمكن أن يصممه الإنسان.
مهام متكررة:
في بعض الأحيان ، لا تكون الروبوتات أسرع بكثير من البشر ، لكنها جيدة في القيام بنفس الوظيفة مرارًا وتكرارًا. هذا سهل بالنسبة للروبوت ، لأنه بمجرد أن تتم برمجة الروبوت للقيام بعمل ما مرة واحدة ، يمكن تشغيل نفس البرنامج عدة مرات لتنفيذ المهمة عدة مرات. ولن يمل الروبوت كما يفعل الإنسان.
كفاءة:
الكفاءة هي كل شيء عن تنفيذ المهام دون إهدار. هذا يعني
- لا تضيع الوقت
- عدم إهدار المواد
- لا تهدر الطاقة
صحة:
الدقة هي كل شيء عن تنفيذ المهام بدقة شديدة. في عناصر تصنيع المصنع ، يجب تصنيع كل عنصر بشكل متماثل. عندما يتم تجميع العناصر ، يمكن للروبوت وضع أجزاء في جزء من المليمتر.
السيطرة على الروبوت
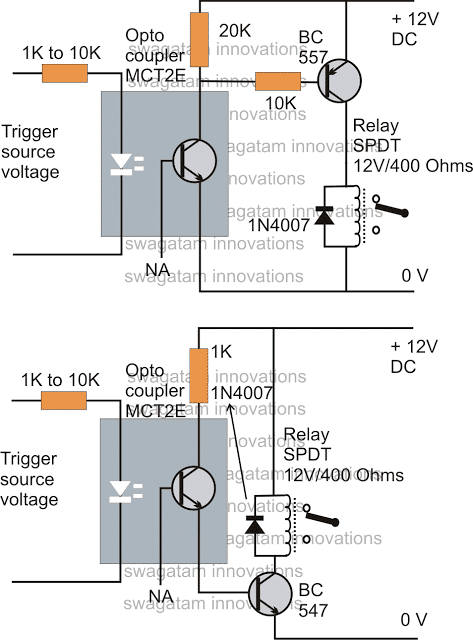
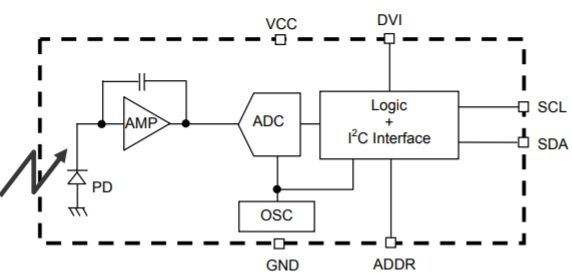
يتكون الروبوت الأساسي أو النظام الآلي من جسم صلب يضم الدوائر الكهربائية الكاملة للروبوت. تتكون الدائرة من أجهزة استشعار تستشعر أي تغييرات في البيئة وتغذي هذه المعلومات إلى وحدة التحكم.
بناءً على المدخلات من المستشعرات ، تتحكم وحدة التحكم في المحركات وفقًا لذلك. وبالتالي فإن العملية الرئيسية للروبوت تكمن في وحدة التحكم. في بعض التطبيقات ، يكون الروبوت آليًا تمامًا ، أي أن التحكم يقع داخل الجهاز نفسه ، وبناءً على بعض وحدات الاستشعار ، يتم التحكم في المحركات تلقائيًا بواسطة وحدة التحكم. في بعض التطبيقات ، يتم التحكم في الروبوت يدويًا.
دعونا نرى طريقتين للتحكم في الروبوت يدويًا
- باستخدام الهاتف الخلوي
- باستخدام جهاز التحكم عن بعد الخاص بالتلفزيون
السيارة الروبوتية التي تسيطر عليها الهاتف الخليوي:
عندما نتحدث عن مركبات الروبوت اللاسلكية ، نحن نفكر عمومًا في دوائر تقنية التردد اللاسلكي. لكن هذا المشروع مختلف جدا. يستخدم الهاتف الخلوي للتحكم في حركة السيارة الآلية. هنا استخدمنا تقنية DTMF للتحكم في السيارة الآلية باستخدام الهاتف المحمول. استخدمنا هاتفين خلويين أحدهما متصل بالروبوت والآخر بهاتف المستخدم. يتم الاتصال بين هذين الهاتفين المتحركين ، وفي حالة الضغط على أي مفتاح ، يتم سماع هذه النغمة إلى طرف آخر من الخلية. هذه النغمة تسمى نغمة 'نغمة مزدوجة متعددة التردد' (DTMF).

السيارة الروبوتية التي تسيطر عليها الهاتف الخليوي

مخطط حلبة السيارة الآلية التي يتم التحكم فيها بواسطة الهاتف الخليوي
تم تصميم هذا المشروع لتطوير مركبة آلية التي يتم التحكم فيها عن طريق الهاتف الخليوي. يعتمد هذا على متحكم 8051. يتحكم الهاتفان الخلويان في الروبوت حسب المتطلبات. يتصل أحد الهواتف المحمولة بالروبوت والآخر بخلية المستخدم. عندما يتم الضغط على مفتاح على الهاتف الخلوي للمستخدم يولد هذا المفتاح النغمة المقابلة ، يتم استلامه في خلية أخرى. تتم معالجة النغمة المستلمة بواسطة متحكم بمساعدة وحدة فك ترميز DTMF. تقوم وحدة فك التشفير بفك تشفير نغمة DTMF إلى أرقام ثنائية ويتم إرسال هذه البيانات المشفرة الثنائية إلى وحدة التحكم الدقيقة. بناءً على المدخلات من الهاتف الخلوي ، يعطي المتحكم الدقيق وفقًا لذلك الإشارات المناسبة إلى سائق المحرك لتدوير كل محرك في الاتجاه المطلوب. على سبيل المثال ، عند الضغط على رقم معين على هاتف المستخدم المحمول ، يتم الاتصال تلقائيًا بالهاتف المحمول الخاص بالنظام. يتم توصيل جهاز النظام المحمول بجهاز فك التشفير DTMF والذي يقوم وفقًا لذلك بفك تشفير النغمة ويتم تدوير المحرك في الاتجاه المقابل للرقم المضغوط.
مركبة روبوتية يتم التحكم فيها بالأشعة تحت الحمراء:
في هذا النظام ، يتم التحكم في السيارة الآلية بشكل أساسي بواسطة جهاز التحكم عن بعد الخاص بالتلفزيون. يتم توصيل مستشعر الأشعة تحت الحمراء (IR) بوحدة التحكم في الروبوت لاستشعار الإشارة البعيدة. يتم تمرير هذه المعلومات إلى وحدة التحكم التي تحرك الروبوت وفقًا للمتطلبات. يتم استخدام متحكم دقيق كنظام تحكم.
في جهاز التحكم عن بعد هذا يعمل كجهاز إرسال. النقطة التي يتم فيها الضغط على الزر في جهاز التحكم عن بُعد ، سيتم تمرير الإشارة واكتسابها بواسطة مستقبل الأشعة تحت الحمراء. يتم إرسال هذه العلامة إلى وحدة التحكم الدقيقة التي تقوم بفك تشفير الإشارة وتنفيذ الحركة المتعلقة بها حسب الزر الذي يتم ضغطه في جهاز التحكم عن بُعد. على سبيل المثال ، إذا تم الضغط على الرقم 1 في جهاز التحكم عن بُعد ، فسيتم تشغيل الروبوت يسارًا وفقًا لمتطلباتنا. سيتم إجراء اختبار التعهدات الأخرى (للأمام والخلف واليمين) بالطريقة المقارنة باستخدام IR. في الطرف المتلقي ، يتم تحقيق التطوير من خلال محركين متصلين بالمتحكم الدقيق.
البرنامج مكتوب على سبيل المثال ، أثناء تنفيذه ، يرسل أوامر إلى سائق المحرك IC وفقًا لمتطلباته لتشغيل المحرك لحركة الروبوت كما هو موضح أعلاه.

مخطط كتلة المركبات الآلية التي يتم التحكم فيها بالأشعة تحت الحمراء
في حالة وجود أي شكوك بخصوص هذا المقال ، يرجى ترك تعليق. واسمحوا لي أن أعرف المزيد من التطبيقات والأساليب المتعلقة بهذا؟