في هذه المقالة سنقوم ببناء مفتاح تشغيل / إيقاف تلقائي ذكي باستخدام Arduino ، والذي يمكنه تشغيل أو إيقاف تشغيل الأدوات تلقائيًا عن طريق استشعار وجود الإنسان في مكان قريب من خلال مفهوم الموجات فوق الصوتية.
سنستخدم وحدة الموجات فوق الصوتية و Arduino لاستشعار وجود الإنسان الذي ينشط الأدوات مثل مصباح الطاولة أو مروحة الطاولة.
ننسى أحيانًا إطفاء الأنوار أو المروحة أثناء مغادرة المنزل ، في منتصف الرحلة ، سندرك أننا نسينا إطفاء 'شيء ما'. هذا يكفي لإفساد رحلتنا السعيدة. لكن البعض لا يدرك حتى أن الطاقة تضيع حتى نعود إلى المنزل.
في هذا المشروع ، نركز على الأدوات التي نستخدمها كثيرًا مثل مصابيح الطاولة / مروحة الطاولة والأدوات الأخرى ، حيث نجلس ونتحرك كثيرًا. قد يؤدي ترك هذه الأجهزة لفترة طويلة إلى فقدان الطاقة والمال.
التصميم:
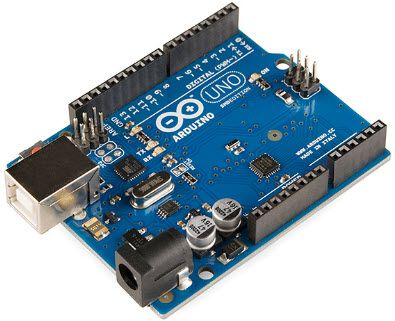
قلب وعقل مفتاح التشغيل / الإيقاف التلقائي الذكي باستخدام Arduino هو وحدة بالموجات فوق الصوتية ، واردوينو على التوالي. تستشعر وحدة الموجات فوق الصوتية وجود الإنسان ، لكن وحدة الموجات فوق الصوتية لا يمكنها التفريق بين الإنسان والعائق مثل الكرسي أمام الطاولة. لذلك من أجل تمكين هذه الميزة ، سنقوم بتعيين مسافة عتبة بين المستشعر والإنسان.
ستقل المسافة بين المستشعر والجسم عندما تدخل عقبة جديدة بينهما مثل هذا الإنسان. إذا اكتشف Arduino المسافة بين عنصرين ، فإن المستوى المحدد ينخفض عن قيمة العتبة وهذا يؤدي إلى تشغيل الترحيل.
عندما يتحرك الشخص خارج نطاق العتبة ، فإنه يقوم بإيقاف تشغيل التتابع.

يوضح الرسم البياني أعلاه بدء تشغيل التتابع في وجود الإنسان ، حيث اكتشف Arduino المسافة التي تقل عن قيمة العتبة.

يوضح الرسم البياني أعلاه أن الترحيل مغلق في حالة عدم وجود الإنسان ، حيث يستمر اردوينو في اكتشاف المسافة فوق قيمة العتبة.
تمت كتابة البرنامج بطريقة تقيس المسافة بين المستشعر والعائق في الوقت الفعلي.
يحتاج المستخدمون إلى إدخال قيمة العتبة بالسنتيمتر قبل التحميل إلى اردوينو.
كيف تعمل

يمكن إدخال مستشعر الموجات فوق الصوتية مباشرة على المسامير التناظرية من A0 إلى A3 ، وأجهزة الاستشعار التي تواجه الخارج ، وهذا قد يقلل من ازدحام الأسلاك أثناء تصميم النموذج الأولي للدائرة.
ملاحظة: #PIN 7 هو إخراج الترحيل
//--------------------Program developed by R.Girish-------------------//
const int trigger = A1
const int echo = A2
int vcc = A0
int gnd = A3
int OP = 7
long Time
float distanceCM
float distance = 15 // set threshold distance in cm
float resultCM
void setup()
{
pinMode(OP,OUTPUT)
pinMode(trigger,OUTPUT)
pinMode(echo,INPUT)
pinMode(vcc,OUTPUT)
pinMode(gnd,OUTPUT)
}
void loop()
{
digitalWrite(vcc,HIGH)
digitalWrite(gnd,LOW)
digitalWrite(trigger,LOW)
delay(1)
digitalWrite(trigger,HIGH)
delayMicroseconds(10)
digitalWrite(trigger,LOW)
Time=pulseIn(echo,HIGH)
distanceCM=Time*0.034
resultCM=distanceCM/2
if(resultCM<=distance)
{
digitalWrite(OP,HIGH)
delay(4000)
}
if(resultCM>=distance)
{
digitalWrite(OP,LOW)
}
delay(10)
}
//-----------------Program developed by R.Girish-------------------//
ملاحظة:
في البرنامج ، استبدل القيمة 15 بمسافة بين المستشعر وحافة الطاولة + 7 إلى 10 سم.
مسافة الطفو = 15 // حدد مسافة العتبة بالسنتيمتر
على سبيل المثال : إذا كانت المسافة بين المستشعر والجدول 100 سم ، أضف 7 إلى 10 سم أكثر وضع القيمة. القيم بالسنتيمتر. قد يستغرق إيقاف تشغيل التتابع ما يصل إلى 4 ثوانٍ بعد أن ابتعد الشخص عن نطاق المستشعر.
السابق: 6 وات دائرة مضخم الصوت باستخدام TDA1011 التالي: حلبة التحكم عن بعد لطائرة RC